01. Range, Velocity, and Angle Resolution
Range, Velocity, and Angle Resolution
Part1
In this lesson, you will learn about the basics of range and velocity estimation using doppler and Fourier transform techniques. Before you get started, let's have a look at three primary dimensions of measurement for radar resolution.
Range, Velocity and Angle Resolution
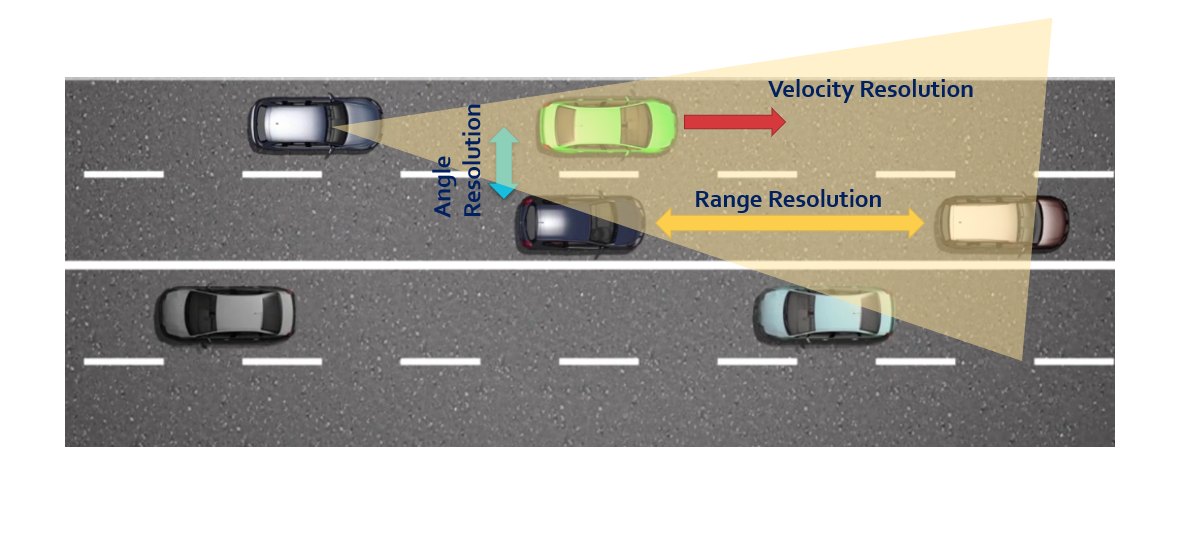
Capability of a radar to resolve two targets based on differences in their distance, angle and velocity.
Resolving Targets
The capability of a radar to resolve targets is very critical for an accurate perception.
Range Resolution : It is the capability of the radar to distinguish between two targets that are very close to each other in range. If a radar has range resolution of 4 meters then it cannot separate on range basis a pedestrian standing 1 m away from the car.
The range resolution is solely dependent on the bandwidth of the chirp B_{sweep} :
Velocity Resolution : If two targets have the same range they can still be resolved if they are traveling at different velocities. The velocity resolution is dependent on the number of chirps. As discussed for our case we selected to send 128 chirps. A higher number of chirps increases the velocity resolution, but it also takes longer to process the signal.
Angle Resolution : Radar is capable of separating two targets spatially. If two targets are at similar range travelling at same velocities, then they can still be resolved based on their angle in radar coordinate system. Angle resolution depends on different parameters depending on the angle estimation technique used. We will cover this in more detail in the next lesson.
Range Resolution